Wyzwanie
Firma Scandinavian Drone chciała zaprezentować możliwości systemu YellowScan Navigator w mętnych wodach typowych dla Skandynawii.
Aby odpowiedzieć na te wyzwania, konieczne było udowodnienie, że Navigator potrafi:
- dokładnie odwzorować struktury podwodne,
- wykrywać osady denne,
- działać skutecznie nawet w trudnych warunkach pomiarowych.
Integracja: Tundra
Rozwiązanie: Navigator
Opinia eksperta:
„Navigator stanowi przełom w technologii batymetrycznego LiDAR.
Sprawia, że zaawansowane pomiary hydrograficzne stają się bardziej dostępne i efektywne, otwierając nowe możliwości dla naszych klientów.”
Martin Andersson
Founder, Scandinavian Drone
Firma: Scandinavian Drone
Strona: www.scandinaviandrone.eu
Kraj: Norwegia
SUCCESS STORY
Rozwiązanie
Po wprowadzeniu Navigatora na rynek szybko zorganizowano demo w Szwecji, wybierając port z ujściem rzeki jako główne miejsce testowe.
Obszar ten – regularnie pogłębiany ze względu na odkładanie się osadów – był idealnym środowiskiem do zaprezentowania możliwości systemu.
Dodatkowo wykonano pomiary w kilku innych portach o różnych warunkach hydrograficznych, aby uzyskać zróżnicowane dane testowe.
Kluczowym elementem było badanie warunków wodnych, które mają bezpośredni wpływ na jakość odbić sygnału.
W trakcie testów przejrzystość wody była stosunkowo dobra, choć pojawiały się trudności związane z osadami w rejonach ujścia rzeki.
Cele demonstracji
- Zaprezentowanie pełnego workflow systemu YellowScan Navigator
- Ocena rzeczywistych możliwości systemu w konkretnych warunkach
- Porównanie Navigatora z echosondami i systemami multibeam
- Ocena efektywności i jakości zbierania oraz przetwarzania danych
Parametry misji
- Wysokość lotu: 60 m
- Prędkość: 5 m/s
- Czas lotu: 18 minut (w tym 11 minut zbierania danych)
- Pokrycie: ok. 60 000 m² na lot
Sprzęt
- YellowScan Navigator – zbieranie danych batymetrycznych
- Hexadrone Tundra 2 – platforma UAV o udźwigu do 5 kg, idealna do pracy z Navigator
Oprogramowanie i systemy wspierające
- UGCS – planowanie i realizacja misji
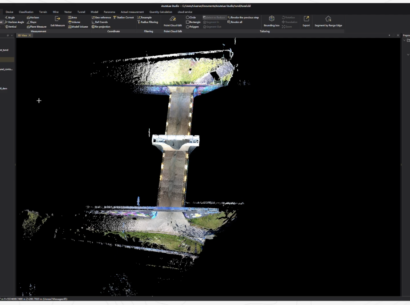
- YellowScan CloudStation – ekstrakcja i wizualizacja chmury punktów
- Emild Reach RS2 – stacja bazowa do precyzyjnego georeferencjonowania
W trakcie demo wykonano loty nad dwoma portami oraz dodatkowymi obszarami testowymi.
Zespół zadbał o ok. 50% pokrycia (overlap), co zapewniło optymalną jakość danych.
Wyniki
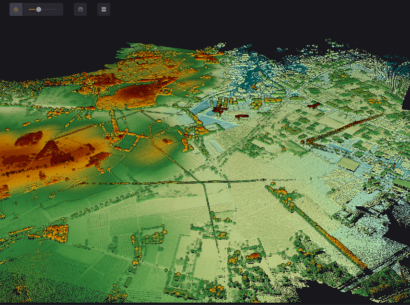
- Gęstość chmury punktów: 15–20 pkt/m²
System Navigator przekroczył oczekiwania, efektywnie zbierając dane batymetryczne na dużych obszarach.
Podczas jednego z lotów osiągnięto pomiar głębokości około 7 metrów, co było bardzo dobrym wynikiem w danych warunkach.
Dane zapewniły wyraźne odwzorowanie dna, w tym:
- łach piasku,
- struktur dennych,
co umożliwia:
- analizę zmian w czasie,
- lepsze zrozumienie topografii podwodnej.
Szczegółowe chmury punktów dostarczyły informacji o:
- strukturach podwodnych,
- depozytach osadów,
- obszarach wymagających pogłębiania,
co potwierdza przewagę jakości danych i wizualizacji nad metodami tradycyjnymi.
Demo potwierdziło:
- skuteczność systemu,
- bezpieczeństwo operacyjne,
- możliwość prowadzenia dokładnych pomiarów w różnych warunkach hydrograficznych.