Klasyczny problem geodety: co zrobić, gdy GNSS przestaje działać?
Każdy geodeta prędzej czy później trafia na obiekt, w którym sygnał GNSS, w tym GPS i innych systemów satelitarnych, staje się bezużyteczny. Tunele, przejścia podziemne, kładki, hale przemysłowe czy obiekty infrastrukturalne skutecznie ograniczają widoczność nieba, a tym samym możliwość pracy w klasycznym trybie RTK.
W takich miejscach pojawia się problem.
A właściwie kilka problemów jednocześnie.
Trzeba zachować pomiar wysokiej precyzji, utrzymać odniesienie do globalnego układu współrzędnych, a jednocześnie nie wydłużać czasu pracy w terenie. W praktyce oznacza to często konieczność wykorzystania dodatkowego sprzętu, zakładania punktów pośrednich lub wykonywania kolejnych pomiarów kontrolnych.
A gdyby można było wykonać cały pomiar jednym zintegrowanym systemem pomiarowym?
Dlaczego przejścia podziemne są trudne do pomiaru?
Przejścia podziemne stanowią jedno z bardziej wymagających środowisk pomiarowych.
Największym problemem jest ograniczona widoczność satelitów. W większości obiektu odbiornik GNSS nie jest w stanie utrzymać rozwiązania RTK, ponieważ horyzont pozostaje niemal całkowicie zasłonięty, a w takim środowisku ograniczona jest też liczba dostępnych kanałów odbioru sygnału.
Dla geodety oznacza to konieczność zmiany metody pracy.
Pojawiają się dodatkowe etapy, więcej sprzętu oraz większe ryzyko błędów wynikających z łączenia danych pochodzących z różnych źródeł.
Właśnie dlatego postanowiliśmy sprawdzić, jak z takim zadaniem poradzi sobie South SLAM Me RTK.
Test w rzeczywistych warunkach
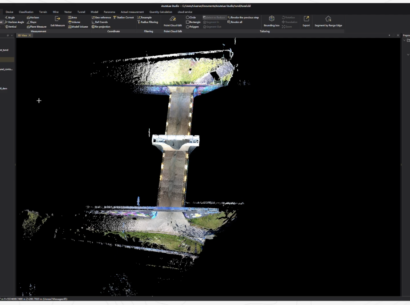
Przedmiotem pomiaru było piesze przejście podziemne.
Pomiar rozpoczęliśmy w miejscu zapewniającym pełny dostęp do sygnału GNSS. Po uzyskaniu rozwiązania fazowego RTK urządzenie wykorzystało zasięg sygnału przed wejściem do obiektu do poprawnego rozpoczęcia trajektorii, a następnie rozpoczęliśmy przejście przez cały obiekt.
Następnie, po wyjściu z drugiej strony tunelu, urządzenie ponownie uzyskało fix RTK.
Dzięki temu cała trajektoria została automatycznie wyrównana i osadzona w globalnym układzie współrzędnych wraz z wysokościami ortometrycznymi.
Bez zakładania dodatkowych punktów.
Bez wielokrotnego przechodzenia przez obiekt.
Bez konieczności wykonywania dodatkowych pomiarów kontrolnych.
South SLAM Me RTK – połączenie technologii SLAM RTK i GNSS RTK
Technologia SLAM (Simultaneous Localization and Mapping) pozwala jednocześnie określać położenie urządzenia oraz budować model otoczenia; w praktyce dotyczy to także rozwiązań klasy master slam rtk.
W praktyce oznacza to możliwość kontynuowania pomiaru nawet wtedy, gdy sygnał satelitarny przestaje być dostępny, a więc także tam, gdzie takie rozwiązania są dostępne mimo zaniku sygnału.
Połączenie SLAM z odbiornikiem GNSS RTK daje geodecie dwie kluczowe korzyści:
- możliwość pracy w miejscach pozbawionych sygnału GNSS,
- zachowanie odniesienia do globalnego układu współrzędnych.
Taki system pozostaje bezpieczny w użytkowaniu, jeśli urządzenie spełnia odpowiednie normy dla komponentów pomiarowych.
To właśnie dlatego rozwiązania typu SLAM RTK coraz częściej wykorzystywane są przy inwentaryzacjach obiektów infrastrukturalnych, tuneli, przejść podziemnych, hal przemysłowych czy obiektów BIM.
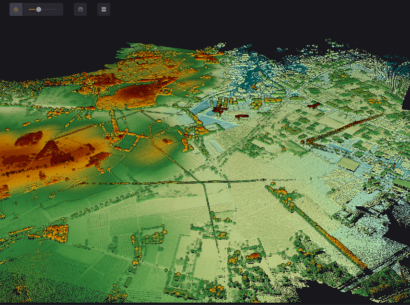
Co można zrobić z pozyskaną chmurą punktów?
Sam pomiar to dopiero początek.
Po zakończeniu skanowania użytkownik otrzymuje kompletne chmury punktów, które mogą zostać wykorzystane do dalszych analiz jako dane przestrzenne.
W naszym przypadku możliwe było między innymi:
Tworzenie przekrojów
Przekroje można generować w dowolnym miejscu obiektu.
Pozwala to szybko analizować geometrię przejścia podziemnego oraz pozyskiwać dane niezbędne do dokumentacji projektowej.
Pomiar wysokości i szerokości
Bezpośrednio na chmurze punktów można wykonywać pomiary odległości, wysokości czy szerokości obiektu.
Nie ma potrzeby wykonywania dodatkowych pomiarów terenowych.
Pobieranie punktów charakterystycznych
Oprogramowanie umożliwia wskazywanie punktów załamań, krawędzi czy innych elementów istotnych z punktu widzenia dokumentacji technicznej.
Eksport danych
Wszystkie pozyskane punkty oraz przekroje można wyeksportować do dalszego opracowania w środowisku CAD lub GIS.
Najciekawszy wynik? Czas pomiaru
W geodezji dokładność jest kluczowa.
Ale równie ważna staje się wydajność.
Analiza trajektorii pokazała, że podczas pomiaru zapisano 126 pozycji RTK.
Cały proces pozyskania danych trwał około dwóch minut.
W ciągu zaledwie dwóch minut otrzymaliśmy kompletną inwentaryzację przejścia podziemnego wraz z chmurą punktów gotową do dalszego opracowania.
To wynik, który jeszcze kilka lat temu byłby trudny do osiągnięcia przy wykorzystaniu klasycznych metod pomiarowych.
Czy technologia SLAM zastąpi tradycyjne pomiary?
Nie zawsze.
I nie taki jest jej cel.
SLAM nie zastępuje geodety ani klasycznych metod pomiarowych.
Daje natomiast możliwość szybszego pozyskiwania danych w miejscach, gdzie tradycyjne rozwiązania stają się czasochłonne lub niewygodne.
W przypadku tuneli, przejść podziemnych czy obiektów infrastrukturalnych może znacząco skrócić czas pracy w terenie i uprościć cały workflow.
A to właśnie wydajność coraz częściej staje się jednym z najważniejszych parametrów nowoczesnej geodezji.
Zobacz pomiar w praktyce
Jeżeli chcesz zobaczyć cały proces pomiaru przejścia podziemnego oraz sposób pracy z chmurą punktów, obejrzyj materiał wideo przygotowany przez Geoline.
To pierwszy z serii testów pokazujących rzeczywiste zastosowania South SLAM Me RTK w codziennej pracy geodety.
W kolejnych materiałach pokażemy następne obiekty, projekty oraz możliwości oprogramowania wykorzystywanego do opracowania danych. W sprawie urządzenia lub prezentacji rozwiązania zapraszamy do kontaktu.